The Pulse Controller Project introduces a novel control strategy for multi-link robotic systems that departs from conventional continuous trajectory tracking in favor of discrete, goal-directed control pulses. Each pulse encodes a ballistic command that respects the system's dynamics while allowing the robot to remain in a low-impedance state during and between actions.
This approach enables safe, energy-efficient interaction with humans and uncertain environments by preserving backdrivability and minimizing resistance to unexpected forces. The architecture combines inner-loop impedance shaping with outer-loop pulsed motion planning, allowing virtual force fields and dynamic constraints to be rendered without imposing stiff feedback gains.
A key benefit of this method is its ability to separate the specification of task goals from the continuous enforcement of motion, thereby supporting human motor learning, comfort, and adaptability in physical interaction. The project has broad implications for real-time control in assistive robotics, rehabilitation, and collaborative manipulation.
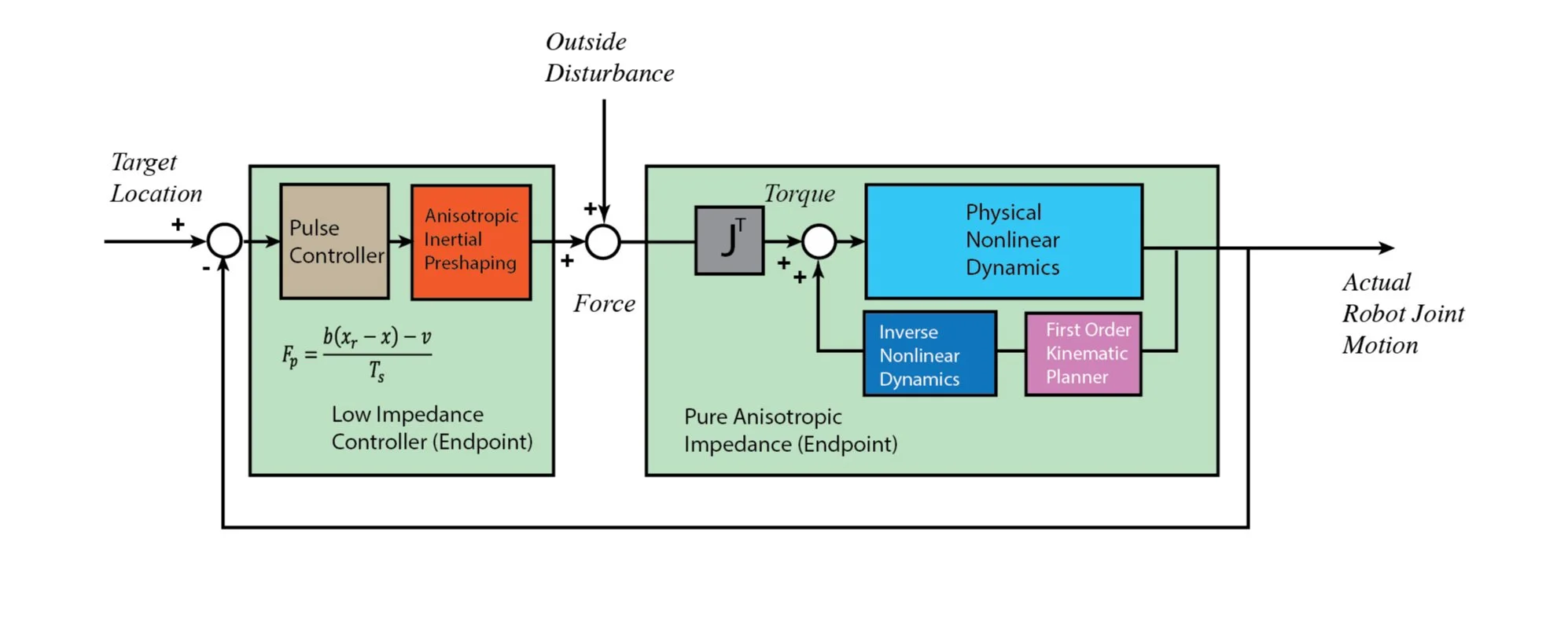
This control architecture features two main components: an inner loop controller that emulates first order dynamics and a pulse controller that initiates movement of the system with appropriate momentum. The inner loop controller takes the current displacement and velocity and computed the appropriate torques to achieve the kinematics of a first order system with specified time constant. The first key insight here is to recognize that the target acceleration and velocity profile are easy to compute if you assume first order dynamics. Stable inner loop dynamics is achieved without worrying about noise of higher order signals. By itself the inner loop would do nothing. The second key insight here is that a driving force, for instance a pulse, can be carefully designed to provide an appropriate starting momentum for the effective inner loop dynamics. The pulse controller at the outer loop computes a discrete duration endpoint force, reshapes the signal according to the variable mass matrix of the robot, then sends the corresponding torques in robot joint space. If all goes according to plan the system will continue to perform smooth ballistic control, and only send pulses in the event of an outside disturbance or modeling error. The behavior as a whole remains extremely low impedance while maintaining high precision in achieving movement goals.
This simulation demonstrates the application of the low impedance pulse controller on a five-bar planar robot. At first, a single pulse is applied that give the robot enough momentum to move to the intended target. Normally, for such a mechanism, momentum of the device naturally leads to curved motion. Note that the position response (top plot) shows no oscillation because the resulting overall dynamics are all first order. This approach could allow for more safer robot-human interaction as well as avoid unwanted high frequency force interactions during mechanical contact with large feedback gains.